ภาพหน้าจอของซอฟแวร์:
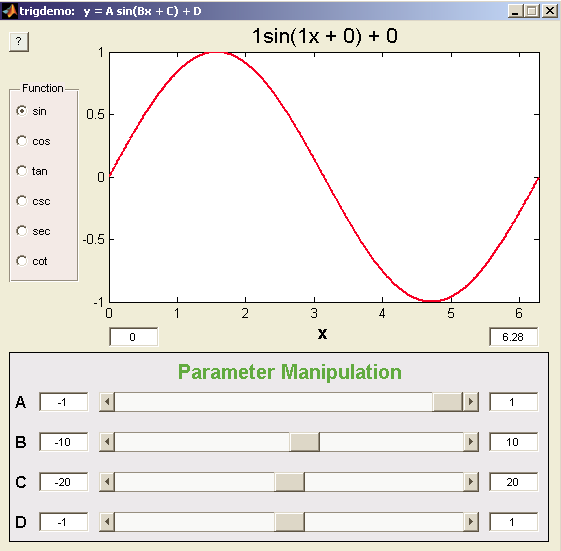
ผู้ใช้สามารถปรับเปลี่ยนด้วยมือค่าของพารามิเตอร์บางและดูว่าพล็อตของฟังก์ชั่นได้รับผลกระทบ
สูตรพื้นฐานที่ยืนอยู่ด้านหลังกราฟสมการคือ
y = Y (x) = หนุน (Bx + C) + D
ที่หนุนเป็นคนใดคนหนึ่งของไซน์โคไซน์สัมผัส, โคเซแคนต์, ซีแคนต์, โคแทนเจนต์.
ต้องการ
- MATLAB 7.4 หรือสูงกว่า
ความคิดเห็นที่ไม่พบ